Sisuliselt on tööpink tööriist masina jaoks, mis juhib tööriista teed – mitte otsese käsitsi juhtimisega, nagu käsitsi tööriistad ja peaaegu kõik inimtööriistad, kuni inimesed leiutasid tööpingi.
Arvjuhtimine (NC) viitab programmeeritava loogika (andmed tähtede, numbrite, sümbolite, sõnade või kombinatsioonide kujul) kasutamisele töötlustööriistade automaatseks juhtimiseks. Enne selle ilmumist kontrollisid töötlemistööriistu alati käsitsi operaatorid.
Arvuti arvjuhtimine (CNC) viitab täpselt kodeeritud juhiste saatmisele mehaanilise tööriista juhtimissüsteemi mikroprotsessorile, et parandada täpsust ja järjepidevust. CNC, millest tänapäeval räägitakse, viitab peaaegu kõik arvutiga ühendatud freespinkidele. Tehniliselt võib seda kasutada mis tahes arvutiga juhitava masina kirjeldamiseks.
Möödunud sajandil on paljud leiutised pannud aluse CNC-tööpinkide arendamisele. Siin vaatleme nelja arvjuhtimistehnoloogia arendamise põhielementi: varased tööpingid, perfokaardid, servomehhanismid ja automaatse programmeerimistööriistade (APT) programmeerimiskeel.
Teise tööstusrevolutsiooni ajal Suurbritannias kiideti James Watti tööstusrevolutsiooni jõuallikaks olnud aurumasina loomise eest, kuid tal oli raskusi aurumasinate silindrite täpsuse tootmisel kuni 1775. aastani, John Johnwilkinson lõi maailma esimese tööpinki. aurumasinate silindrite puurimiseks ja sai lahendatud. Selle igavmasina on samuti disaininud Wilkinson oma algse kahuri põhjal;
1725. aastal leiutas Prantsuse tekstiilitööline Basile Bouchon meetodi kangastelgede juhtimiseks, kasutades paberlintidele kodeeritud andmeid läbi rea aukude. Kuigi see on murranguline, on selle meetodi puudus ka ilmne, see tähendab, et see vajab siiski operaatoreid. Aastal 1805 võttis Joseph Marie žakaarmahuti selle kontseptsiooni kasutusele, kuid seda tugevdati ja lihtsustati, kasutades järjestikku järjestatud tugevamaid perfokaarte, automatiseerides sellega protsessi. Neid perfokaarte peetakse laialdaselt tänapäevase andmetöötluse aluseks ja need tähistavad koduse käsitöötööstuse lõppu kudumises.
Huvitaval kombel pidasid žakaarkangastelgedel sel ajal vastu siidikudujad, kes muretsesid, et see automaatika jätab nad ilma tööst ja elatist. Nad põletasid korduvalt tootmisse pandud kangasteljed; Nende vastupanu osutus aga mõttetuks, sest tööstus tunnistas automatiseeritud kangastelgede eeliseid. Aastaks 1812 oli Prantsusmaal kasutusel 11 000 žakaarkangast.

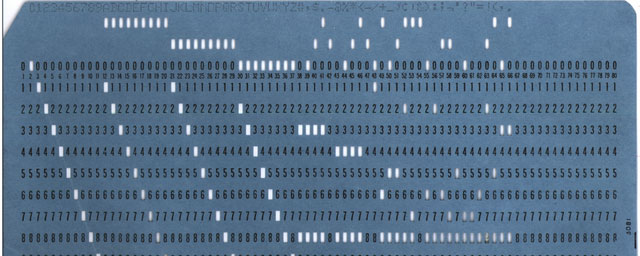
Perfokaardid töötati välja 1800. aastate lõpus ja leidsid palju kasutusalasid alates telegraafist kuni automaatklaverini. Kuigi mehaanilise juhtimise otsustasid varased kaardid, lõi Ameerika leiutaja Herman Hollerith elektromehaanilise perfokaartide tabulaatori, mis muutis mängureegleid. Tema süsteem patenteeriti 1889. aastal, kui ta töötas USA rahvaloenduse büroos.
Herman Hollerith asutas tabeldusfirma 1896. aastal ja ühines nelja teise ettevõttega, et asutada 1924. aastal IBM. 20. sajandi teisel poolel hakati perfokaarte esimest korda kasutama arvutite ja arvjuhtimismasinate andmete sisestamiseks ja salvestamiseks. Algvormingus on viis rida auke, järgmistes versioonides aga kuus, seitse, kaheksa või enam rida.
Servomehhanism on automaatne seade, mis kasutab masina või mehhanismi töö parandamiseks veainduktiivset tagasisidet. Mõnel juhul võimaldab servo suure võimsusega seadmeid juhtida palju väiksema võimsusega seadmetega. Servomehhanism koosneb juhitavast seadmest, teisest käsklusi andvast seadmest, veatuvastusinstrumendist, veasignaali võimendist ja seadmest (servomootor), mis parandab vigu. Servosüsteeme kasutatakse tavaliselt selliste muutujate juhtimiseks nagu asend ja kiirus ning levinumad on elektrilised, pneumaatilised või hüdraulilised.
Esimese elektrilise servomehhanismi asutas H. kalender Suurbritannias 1896. aastal. 1940. aastaks lõi MIT spetsiaalse servomehhanismide laboratooriumi, mis sai alguse elektrotehnika osakonna kasvavast tähelepanust sellele teemale. CNC-töötluses on servosüsteem väga oluline, et saavutada automaatse töötlusprotsessi nõutav tolerantsi täpsus.
Automaatne programmeerimistööriist (APT)
Automaatne programmeerimistööriist (APT) sündis Massachusettsi Tehnoloogiainstituudi servomehhanismi laboris 1956. aastal. See on arvutirakenduste rühma loominguline saavutus. See on lihtsalt kasutatav kõrgetasemeline programmeerimiskeel, mida kasutatakse spetsiaalselt CNC-tööpinkide juhiste genereerimiseks. Algne versioon oli varasem kui FORTRAN, kuid hilisemad versioonid kirjutati ümber Fortraniga.
Apt on keel, mis on loodud töötama MIT-i esimese NC-masinaga, mis on maailma esimene NC-masin. Seejärel muutus see jätkuvalt arvutiga juhitavate tööpinkide programmeerimise standardiks ja seda kasutati laialdaselt 1970. aastatel. Hiljem toetas apti arendamist õhuvägi ja lõpuks avati see tsiviilsektorile.
Arvutirakenduste rühma juht Douglas T. Ross on tuntud kui apt. Hiljem võttis ta kasutusele termini "arvutipõhine disain" (CAD).
Arvjuhtimise sünd
Enne CNC-tööpinkide ilmumist oli esimene CNC-tööpinkide ja esimeste CNC-tööpinkide arendamine. Kuigi ajalooliste detailide erinevates kirjeldustes on mõningaid erinevusi, ei ole esimene CNC-tööpink mitte ainult vastus konkreetsetele tootmisprobleemidele, millega sõjaväelased silmitsi seisavad, vaid ka perfokaardisüsteemi loomulik areng.
"Digijuhtimine tähistab teise tööstusrevolutsiooni algust ja teadusliku ajastu saabumist, kus masinate ja tööstusprotsesside juhtimine muutub ebatäpsetest mustanditest täpseteks." – Tootmisinseneride Liit.
Ameerika leiutajat John T. Parsonsit (1913–2007) peetakse laialdaselt arvjuhtimise isaks. Ta mõtles välja ja rakendas arvjuhtimistehnoloogiat lennukiinseneri Frank L. stuleni abiga. Michiganis asuva tootja pojana asus Parsons 14-aastaselt tööle monteerijana oma isa tehases. Hiljem omas ja juhtis ta pereettevõtte Parsons tootmisettevõtte all mitmeid tootmisettevõtteid.
Parsonsil on esimene NC patent ja ta valiti riikliku leiutajate kuulsuste halli oma teedrajava töö eest arvjuhtimise valdkonnas. Parsonsil on kokku 15 patenti ja veel 35 on tema ettevõttele antud. Tootmisinseneride selts intervjueeris Parsonsit 2001. aastal, et anda kõigile tema lugu tema vaatenurgast teada.
John T. Parsons tellis Sikorsky Aircrafti alltöövõtu korras helikopteri rootori labade tootmiseks.
tiibtala konstruktsioonivea tõttu ebaõnnestus üks esimesest 18-st nende valmistatud labast, mille tulemuseks oli piloodi surm. Parsonsi idee on torgata rootorilaba tugevamaks muutmiseks metalliga ning asendada koostu kinnitamiseks liim ja kruvid.
inimesed tahtsid luua tootmistööriista terade täpseks tootmiseks, mis oli tolleaegsete tingimuste jaoks tohutu ja keeruline väljakutse. Seetõttu palkas Parsons lennukiinsener Frank Stüleni ja moodustas koos kolme inimesega insenerimeeskonna. Stulen mõtles tera stressitaseme määramiseks kasutada IBMi perfokaarte ja rentisid selle projekti jaoks seitse IBMi masinat.
1948. aastal saavutati automaatsete tööpinkide liikumisjada hõlpsasti muutmise eesmärk kahel peamisel viisil – võrreldes lihtsalt fikseeritud liikumisjärjestuse seadmisega – ja seda teostatakse kahel põhilisel viisil: jälgimisjuhtimine ja digitaaljuhtimine. Nagu näeme, tuleb esimesena teha objektist füüsiline mudel (või vähemalt täielik joonis, näiteks Cincinnati kaablijälgija hüdroelektritelefon). Teine on mitte objekti või osa kujutise täiendamine, vaid ainult selle abstraktsioon: matemaatilised mudelid ja masina juhised.
USA õhuvägi vajab ülitäpse tiivakonstruktsiooni abi. Parsons müüs oma CNC-masina ja võitis selle elluviimiseks 200 000 dollari väärtuses lepingu.
Parsons ja stulen töötasid masinate väljatöötamisel ettevõttega Snyder machine & tool Corp. ning mõistsid, et masinate täpseks töötamiseks on neil vaja servomootoreid. Parsons tellis alltöövõtu korras Card-a-matic freespingi servosüsteemi Massachusettsi Tehnoloogiainstituudi servomehhanismi laboratooriumiga.
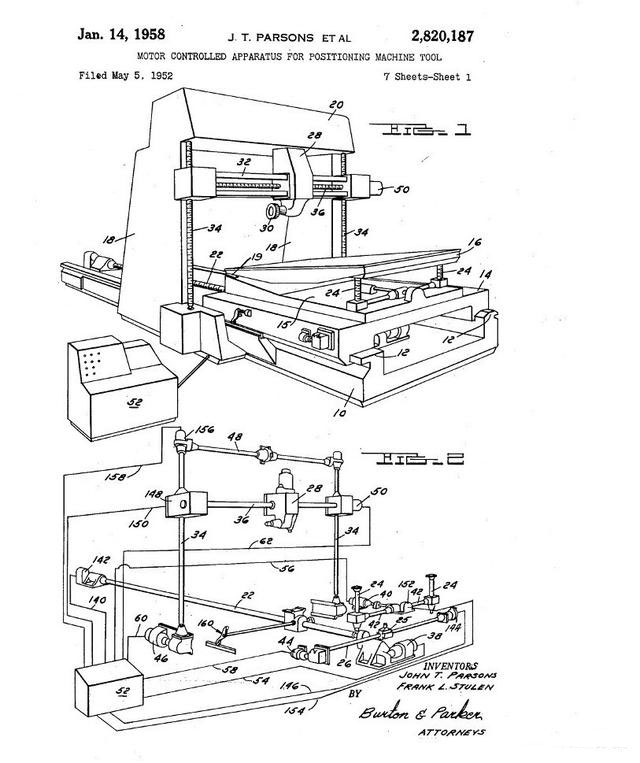
1952 (mai): Parsons taotles patenti "tööpinkide positsioneerimise mootorijuhtimisseadmele". Ta andis patendi 1958. aastal.
1952 (august):vastuseks taotles MIT patenti "arvjuhtimisservosüsteemile".
Pärast Teist maailmasõda sõlmisid USA õhujõud Parsonsiga mitu lepingut, et arendada edasi selle asutaja John Parsonsi tehtud NC-töötlusinnovatsiooni. Parsons tundis huvi MIT-i servomehhanismide laboris läbiviidavate katsete vastu ja tegi ettepaneku, et MIT saaks 1949. aastal projekti alltöövõtjaks, et pakkuda automaatjuhtimise alast teadmisi. Järgmise 10 aastaga saavutas MIT kontrolli kogu projekti üle, sest servolaboratooriumi "kolmeteljelise pideva teejuhtimise" visioon asendas Parsonsi esialgse kontseptsiooni "lõikamise positsioneerimisest". Probleemid kujundavad alati tehnoloogiat, kuid sellest ajaloolase David Noble'i salvestatud erilisest loost on saanud tehnoloogia ajaloos oluline verstapost.
1952:MIT demonstreeris oma 7-rööpalist perforeeritud rihmasüsteemi, mis on keeruline ja kallis (250 vaakumtoru, 175 releed, viies külmiku suuruses kapis).
MIT-i algne CNC freespink 1952. aastal oli hüdro Tel, modifitseeritud 3-teljelise Cincinnati freespinkide ettevõte.
1952. aasta septembris Scientific Americani ajakirjas "Automatic control" on seitse artiklit "isereguleeruvast masinast, mis esindab teaduslikku ja tehnoloogilist revolutsiooni, mis kujundab tõhusalt inimkonna tulevikku".
1955:Concordi juhtelemendid (mis koosnesid MIT-i algse meeskonna liikmetest) lõid numbrikaardi, mis asendas MIT NC-masinate perforeeritud lindi GE väljatöötatava lindilugejaga.
Lindi hoiustamine
1958:Parsons sai USA patendi 2820187 ja müüs ainulitsentsi Bendixile. IBM, Fujitsu ja General Electric said kõik alllitsentsid pärast seda, kui nad hakkasid oma masinaid välja töötama.
1958:MIT avaldas NC-ökonoomika raporti, milles jõuti järeldusele, et praegune NC-masin ei säästnud tegelikult aega, vaid viis tööjõu tehase töökojast üle perforeeritud rihmade valmistajatele.
Postitusaeg: 19. juuli 2022